#include "test_fcl_utility.h"#include "fcl/collision.h"#include "fcl/distance.h"#include <cstdio>#include <cstddef>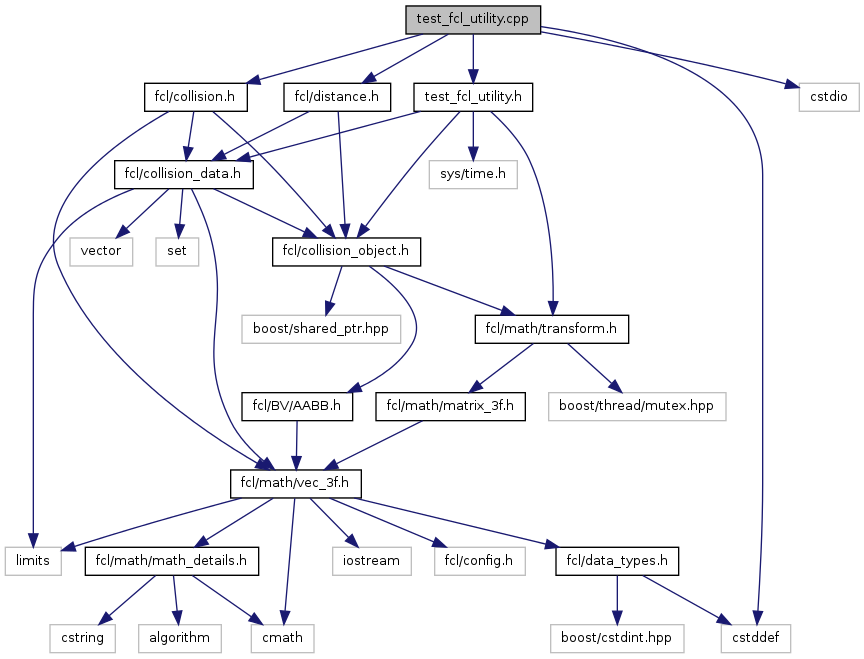
Go to the source code of this file.
Namespaces | |
| namespace | fcl |
Main namespace. | |
Functions | |
| bool | fcl::defaultCollisionFunction (CollisionObject *o1, CollisionObject *o2, void *cdata) |
| Default collision callback for two objects o1 and o2 in broad phase. return value means whether the broad phase can stop now. | |
| bool | fcl::defaultDistanceFunction (CollisionObject *o1, CollisionObject *o2, void *cdata, FCL_REAL &dist) |
| Default distance callback for two objects o1 and o2 in broad phase. return value means whether the broad phase can stop now. also return dist, i.e. the bmin distance till now. | |
| void | fcl::eulerToMatrix (FCL_REAL a, FCL_REAL b, FCL_REAL c, Matrix3f &R) |
| void | fcl::generateRandomTransform (FCL_REAL extents[6], Transform3f &transform) |
| Generate one random transform whose translation is constrained by extents and rotation without constraints. The translation is (x, y, z), and extents[0] <= x <= extents[3], extents[1] <= y <= extents[4], extents[2] <= z <= extents[5]. | |
| void | fcl::generateRandomTransform_ccd (FCL_REAL extents[6], std::vector< Transform3f > &transforms, std::vector< Transform3f > &transforms2, FCL_REAL delta_trans[3], FCL_REAL delta_rot, std::size_t n, const std::vector< Vec3f > &vertices1, const std::vector< Triangle > &triangles1, const std::vector< Vec3f > &vertices2, const std::vector< Triangle > &triangles2) |
| void | fcl::generateRandomTransforms (FCL_REAL extents[6], std::vector< Transform3f > &transforms, std::size_t n) |
| Generate n random transforms whose translations are constrained by extents. | |
| void | fcl::generateRandomTransforms (FCL_REAL extents[6], FCL_REAL delta_trans[3], FCL_REAL delta_rot, std::vector< Transform3f > &transforms, std::vector< Transform3f > &transforms2, std::size_t n) |
| Generate n random transforms whose translations are constrained by extents. Also generate another transforms2 which have additional random translation & rotation to the transforms generated. | |
| void | fcl::loadOBJFile (const char *filename, std::vector< Vec3f > &points, std::vector< Triangle > &triangles) |
| Load an obj mesh file. | |
| FCL_REAL | fcl::rand_interval (FCL_REAL rmin, FCL_REAL rmax) |

