main.cpp
The full text of main.cpp is here: src/main.cpp
The main() for this “myviz” example is very simple, it just
initializes ROS, creates a QApplication, creates the top-level
widget (of type “MyViz”), shows it, and runs the Qt event loop.
#include <QApplication>
#include <ros/ros.h>
#include "myviz.h"
int main(int argc, char **argv)
{
if( !ros::isInitialized() )
{
ros::init( argc, argv, "myviz", ros::init_options::AnonymousName );
}
QApplication app( argc, argv );
MyViz* myviz = new MyViz();
myviz->show();
app.exec();
delete myviz;
}
myviz.cpp
The full text of myviz.cpp is here: src/myviz.cpp
Constructor for MyViz. This does most of the work of the class.
MyViz::MyViz( QWidget* parent )
: QWidget( parent )
{
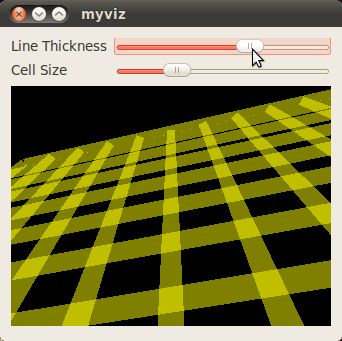
Construct and lay out labels and slider controls.
QLabel* thickness_label = new QLabel( "Line Thickness" );
QSlider* thickness_slider = new QSlider( Qt::Horizontal );
thickness_slider->setMinimum( 1 );
thickness_slider->setMaximum( 100 );
QLabel* cell_size_label = new QLabel( "Cell Size" );
QSlider* cell_size_slider = new QSlider( Qt::Horizontal );
cell_size_slider->setMinimum( 1 );
cell_size_slider->setMaximum( 100 );
QGridLayout* controls_layout = new QGridLayout();
controls_layout->addWidget( thickness_label, 0, 0 );
controls_layout->addWidget( thickness_slider, 0, 1 );
controls_layout->addWidget( cell_size_label, 1, 0 );
controls_layout->addWidget( cell_size_slider, 1, 1 );
Construct and lay out render panel.
render_panel_ = new rviz::RenderPanel();
QVBoxLayout* main_layout = new QVBoxLayout;
main_layout->addLayout( controls_layout );
main_layout->addWidget( render_panel_ );
Set the top-level layout for this MyViz widget.
setLayout( main_layout );
Make signal/slot connections.
connect( thickness_slider, SIGNAL( valueChanged( int )), this, SLOT( setThickness( int )));
connect( cell_size_slider, SIGNAL( valueChanged( int )), this, SLOT( setCellSize( int )));
Next we initialize the main RViz classes.
The VisualizationManager is the container for Display objects,
holds the main Ogre scene, holds the ViewController, etc. It is
very central and we will probably need one in every usage of
librviz.
manager_ = new rviz::VisualizationManager( render_panel_ );
render_panel_->initialize( manager_->getSceneManager(), manager_ );
manager_->initialize();
manager_->startUpdate();
Create a Grid display.
rviz::DisplayWrapper* wrapper = manager_->createDisplay( "rviz/Grid", "adjustable grid", true );
ROS_ASSERT( wrapper != NULL );
Unwrap it.
rviz::Display* display = wrapper->getDisplay();
ROS_ASSERT( display != NULL );
Downcast it to the type we think we know it is.
(This is one part I would like to improve in the future. For
this to work currently, we need to link against the plugin
library containing GridDisplay (libdefault_plugin.so) in addition
to linking against librviz.so. This pretty much negates the
benefits of the plugin architecture.)
grid_ = dynamic_cast<rviz::GridDisplay*>( display );
ROS_ASSERT( grid_ != NULL );
Configure the GridDisplay the way we like it.
grid_->setStyle( rviz::Grid::Billboards ); // Fat lines.
grid_->setColor( rviz::Color( 1.0f, 1.0f, 0.0f )); // I like yellow.
Initialize the slider values.
thickness_slider->setValue( 25 );
cell_size_slider->setValue( 10 );
}
Destructor for MyViz. The complexity here is something I would
like to avoid in future versions.
Removing all the displays first is not technically required for
this example, but if we used a PropertyTreeWidget it would be
required, so it is a good idea.
It would be required because Display objects own Properties, and
Properties own children of PropertyTreeWidget
(PropertyWidgetItems). PropertyTreeWidget notices when
PropertyWidgetItems are destroyed, but Properties don’t notice when
PropertyWidgetItems are destroyed, so must destroy from the Display
(and thus Property) side first.
The render_panel_ is a child widget of MyViz and so would be
deleted naturally by the QWidget destructor, but that would be
after we deleted manager_. Instead we must delete
render_panel_ before manager_ because
~VisualizationManager() destroys ogre SceneManager which
destroys all attached SceneNodes. RenderPanel indirectly holds
pointers to SceneNodes which it destroys. RenderPanel doesn’t know
when Ogre destroys its SceneNodes, so RenderPanel would cause a
segfault during its destructor.
MyViz::~MyViz()
{
if( manager_ != NULL )
{
manager_->removeAllDisplays();
}
delete render_panel_;
delete manager_;
}
This function is a Qt slot connected to a QSlider’s valueChanged()
signal. It calls a property setter function on the GridDisplay,
setLineWidth().
void MyViz::setThickness( int thickness_percent )
{
if( grid_ != NULL )
{
grid_->setLineWidth( thickness_percent / 100.0f );
}
}
This function is a Qt slot connected to a QSlider’s valueChanged()
signal. It calls a property setter function on the GridDisplay,
setCellSize().
void MyViz::setCellSize( int cell_size_percent )
{
if( grid_ != NULL )
{
grid_->setCellSize( cell_size_percent / 10.0f );
}
}