





The Aldebaran Nao is a commercially available, 60cm tall, humanoid robot targeted at research lab and classrooms. The Nao is small, but it packs a lot into its tiny frame: four microphones, two VGA cameras, touch sensors on the head, infrared sensors, and more. The use of Nao with ROS has demonstrated how quickly open-source code can enable a community to come together around a common hardware platform.
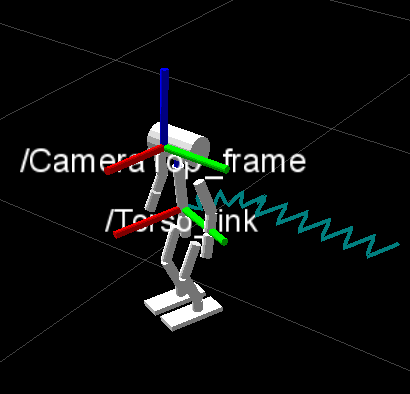 The first Nao driver for ROS was released by Brown University's RLAB in November of 2009. This initial release included head control, text-to-speech, basic navigation, and access to the forehead camera. Just a couple of days later, the University of Freiburg's Humanoid Robot Lab used Brown's Nao driver to develop new capabilities, including torso odometry and joystick-based tele-operation. Development didn't stop there: in December, the Humanoid Robot Lab put together a complete ROS stack for the Nao that added IMU state, a URDF robot model, visualization of the robot state in rviz, and more.
The first Nao driver for ROS was released by Brown University's RLAB in November of 2009. This initial release included head control, text-to-speech, basic navigation, and access to the forehead camera. Just a couple of days later, the University of Freiburg's Humanoid Robot Lab used Brown's Nao driver to develop new capabilities, including torso odometry and joystick-based tele-operation. Development didn't stop there: in December, the Humanoid Robot Lab put together a complete ROS stack for the Nao that added IMU state, a URDF robot model, visualization of the robot state in rviz, and more.
The Nao SDK already comes with built-in support for the open-source OpenCV library. It will be exciting to see what additional capabilities the Nao will gain now that it can be connected to the hundreds of different ROS packages that are freely available.
Brown is also using open source and ROS as part of their research process:
Publishing our ROS code as well as research papers is now an integral part of disseminating our work. ROS provides the best means forward for enabling robotics researchers to share their results and more rapidly advance the state-of-the-art.
-- Chad Jenkins, Professor, Brown University
The University of Freiburg's Nao stack is available on alufr-ros-pkg. Brown's Nao drivers are available on brown-ros-pkg, along with drivers for the iRobot Create and a Gstream-based webcam driver.
Leave a comment