





Like the Aldebaran Nao, the "Prairie Dog" platform from the Correll Lab at Colorado University is an example of the ROS community building on each others' results, and the best part is that you can build your own.
Prairie Dog is an integrated teaching and research platform built on top of an iRobot Create. It's used in the Multi-Robot Systems course at Colorado University, which teaches core topics like locomotion, kinematics, sensing, and localization, as well as multi-robot issues like coordination. The source code for Prairie Dog, including mapping and localization libraries, is available as part of the prairiedog-ros-pkg ROS repository.
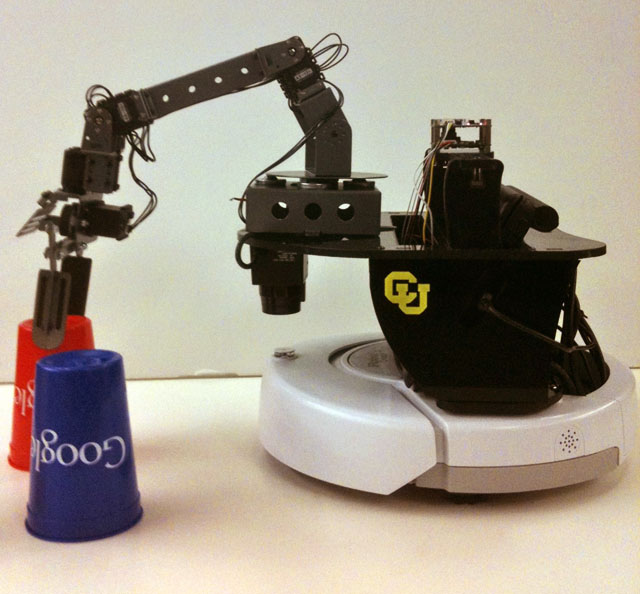
Prairie Dog uses a variety of off-the-shelf robot hardware components: an iRobot Create base, a 4-DOF CrustCrawler AX-12 arm, a Hokuyo URG-04LX laser rangefinder, a Hagisonic Stargazer indoor positioning system, and a Logitech QuickCam 3000. The Correll Lab was able to build on top of existing ROS software packages, such as brown-ros-pkg's irobot_create and robotis packages, plus contribute their own in prairiedog-ros-pkg. Prairie Dog is also integrated with the OpenRAVE motion planning environment.
Starting in the Fall of 2010, RoadNarrows Robotics will be offering a Prairie Dog kit, which will give you all the off-the-shelf components, plus the extra nuts and bolts. Pricing hasn't been announced yet, but the basic parts, including a netbook, will probably run about $3500.
For more information, please see:

Photo: Prairie Dogs busy creating maps for kids and parents
Leave a comment