





We first covered Takashi Ogura's (aka OTL) robot projects back in March when he got the ROS PS3 joystick driver working with an i-Sobot. He has many more fun projects that are too numerous to cover: White Bear Robot (Roomba + Navigation stack), Arduino board for the i-Sobot, Twitter control for humanoid robot, and an all-time classic, humanoid robot with iPhone 3GS head.
Along the way, OTL has been putting together tutorials and previews of ROS libraries for his Japanese audience on ros-robot.blogspot.com, such as a Japanese speech node, Twitter for ROS using OAuth, URDF tutorial, Euslisp demos, and many more.
Many of those tutorials and projects came together in the video above: Kitemas LV1. Kitemas LV1 is a fun drink ordering robot that lets you order a drink and then pours it for you. Judging from previous posts, it looks like Kitemas is using a Roomba with Hokuyo laser range finder for autonomous navigation, as well as a USB web camera. Drink selection can be done either through colored coasters or a Twitter API, and the robot can be driven manually with a PS3 joystick.
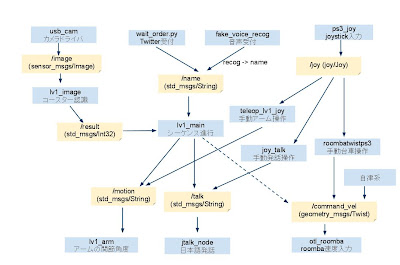
Here's a software diagram that shows the various ROS nodes working together:
OTL has also created otl-ros-pkg, so readers of his blog can get code samples for his various tutorials and even see code for robots like Kitemas above. You can watch a video with a more dressed up version of Kitemas LV1 here.
Leave a comment