





Taylor Veltrop has announced veltrop-ros-pkg as well as tools for Roboard-based humanoids
I am pleased to announce the Veltrop ROS Repository!
If any of you out there are using using small servo based robots, especially humanoid, then then check this out!
The Veltrop ROS Repository leverages ROS to get hobbyists and researchers quickly up and running with the Roboard operating a humanoid robot.
The Roboard is a small 1Ghz 486 platform that has built in PWM control, and many IO ports:
The repository consists of a stack suitable for the Roboard, and another stack specialized for small joint based robots.
The hobby community seems to be reinventing the wheel with each person that combines an embedded PC with one of these humanoid robots. When the beginner tries to do this it's too daunting, and for others it is very time consuming. So I hope to alleviate this, and get some help back too.
Here's a summary of some of the features:
- Pose the robot based on definitions in an XML file
- Execute motions by running a series of timed poses (XML)
- Stabilization via gyro data
- Definition of a KHR style robot linkage for 3D virtual modeling and servo control (URDF)
- Calibrate trim of robot with GUI
- Calibrate gyro stabilization with GUI
- Import poses and trim (not motions) from Kondo's Heart2Heart RCB files
- Control robot remotely over network with keyboard
- Control robot with PS3 controller over bluetooth
- Support for HMC6343 compass/tilt sensor
- Support for Kondo gyro sensors
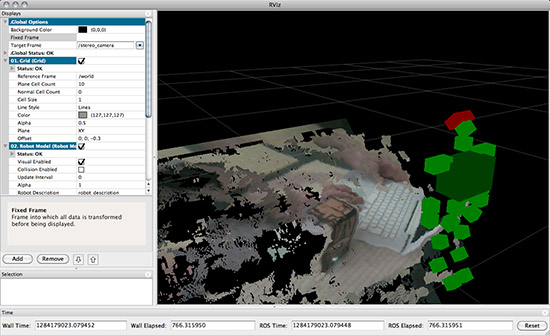
- Stereo video capture and processing into point cloud
- CPU heavy tasks (such as stereo processing) can be executed on remote computer
- Controls Kondo PWM servos
Here's some missing parts (maybe others would like to contribute here?)
- Control Kondo serial servos
- GUI for editing and running poses/motions
- Tool to capture poses
- More sophisticated motion scripting
- GUI for calibration of A/D inputs
My next goals for this project are to incorporate navigation, and arm/gripper trajectory planning.
The documentation is here: http://taylor.veltrop.com/robotics/khrhumanoidv2.php?topic=veltrop-ros-pkg There's a lot of other relevant information to the robot throughout the site.
The repository is hosted on sourceforge: http://sourceforge.net/projects/veltrop-ros-pkg
I hope someone out there has a chance to try this out and contribute!
Taylor
Leave a comment