





Guest post from Mikkel Rath Pedersen, Department of Mechanical and Manufacturing Engineering, Aalborg University
 The autonomous industrial mobile manipulator "Little Helper" has been the focus of
many research activities since the first robot was designed in 2008, at the Department of
Mechanical and Manufacturing Engineering at Aalborg University, Denmark. The focus
has always been on flexible automation, since this is paramount as production companies
experience a shift from mass production to mass customization. An aim is to use existing,
industrial hardware, and incorporating these components into a fully functioning industrial
mobile manipulator.
The autonomous industrial mobile manipulator "Little Helper" has been the focus of
many research activities since the first robot was designed in 2008, at the Department of
Mechanical and Manufacturing Engineering at Aalborg University, Denmark. The focus
has always been on flexible automation, since this is paramount as production companies
experience a shift from mass production to mass customization. An aim is to use existing,
industrial hardware, and incorporating these components into a fully functioning industrial
mobile manipulator.
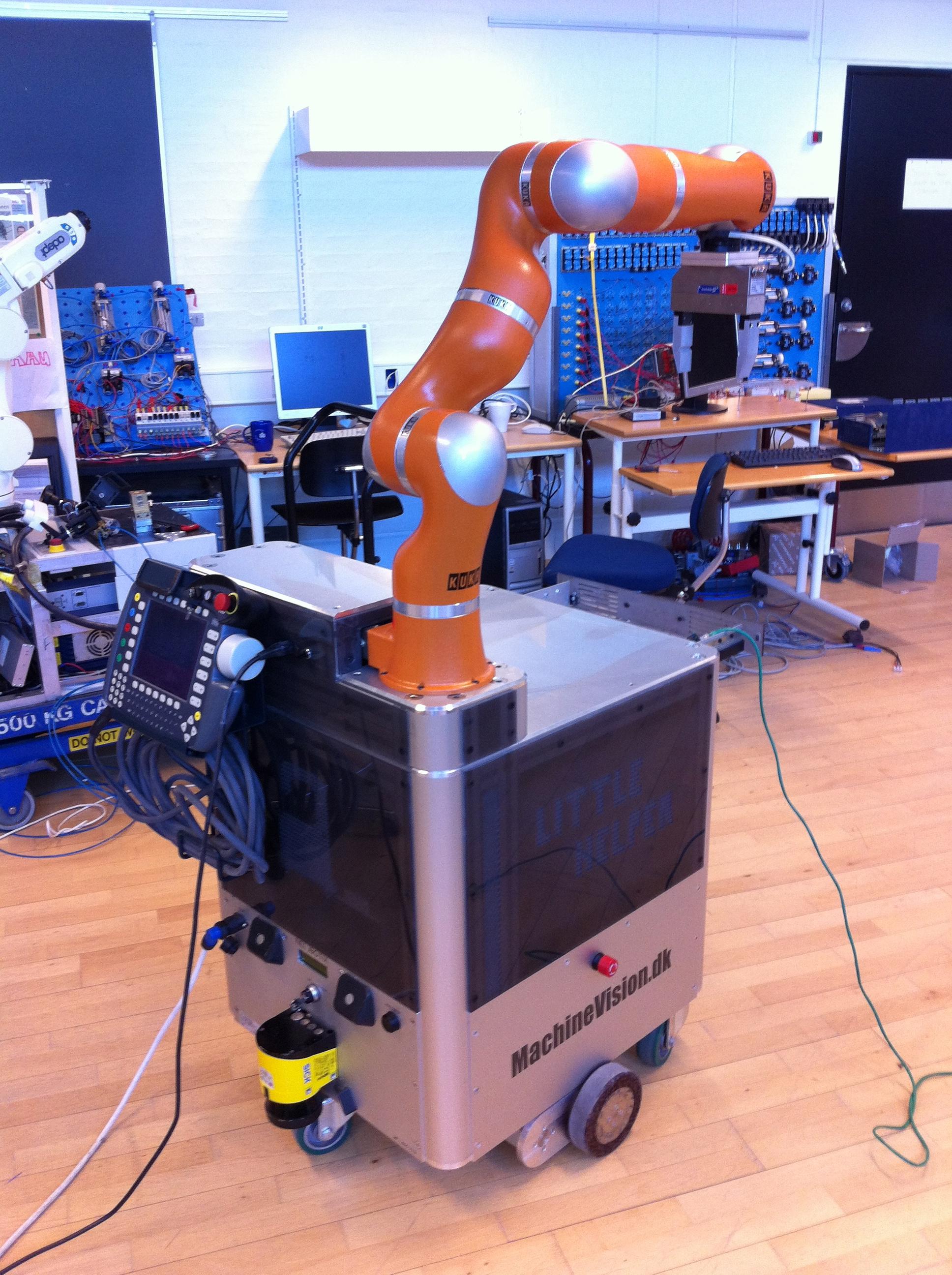
Since the original design, the robot has been rebuilt several times. At the present time, the department has two versions of the Little Helper, at the two campuses of the department in Aalborg and Copenhagen. The two systems use the same hardware, the only differences being minor in the construction and electrical system.
Both systems include the following components:
- KUKA Light Weight Robot (LWR) arm (7DOF, integrated torque sensors in each joint)
- Neobotix MP-L655 differential drive platform, equipped with
- Two SICK S300 Professional laser scanners
- Five ultrasonic sensors
- Eight 12V batteries, yielding 152 Ah @ 24V total
- Schunk WSG-50 electrical parallel gripper
- Microsoft Kinect RGBD Camera
- Onboard ROS computer (workstation on one, laptop on the other)
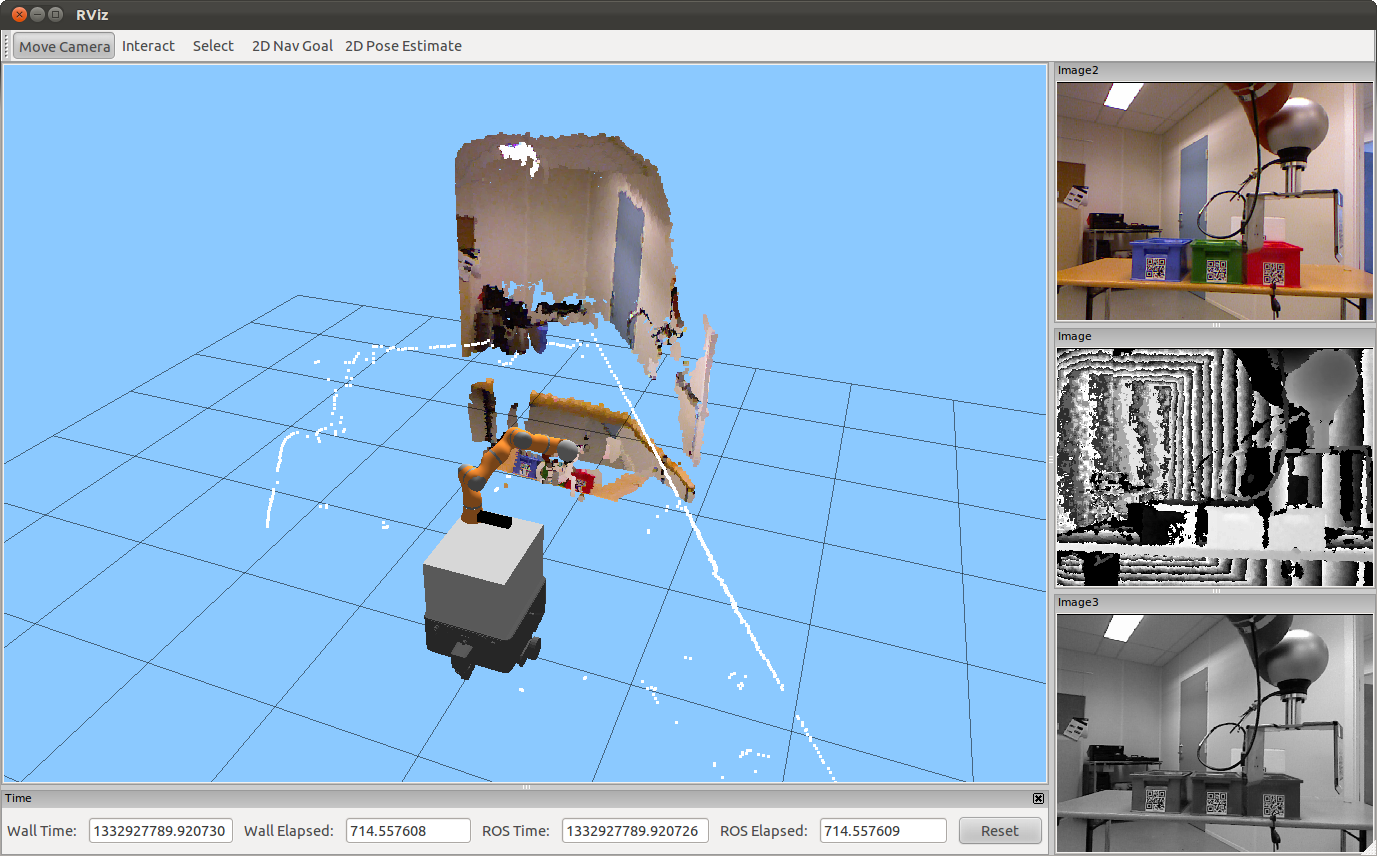
A recent focus has been on the implementation of ROS on the entire system, in order to make the transition from vendor-specific communication protocols to something more general. This required the use of some existing packages, that were readily available on the ROS website, including the stacks for the Kinect camera (openni_camera and openni_tracker), and the Neobotix stacks (neo_driver, neo_common and neo_apps) that were recently made available by Neobotix. However, much work has also gone into creating ROS packages for communicating with the KUKA LWR (through the Fast-Research Interface available with the robot arm) and the Schunk gripper.
The goal of some current and future research projects are:
- modular architectures for mobile manipulators,
- task-level programming using robot skills,
- gesture-based instruction of mobile manipulators, and
- mission planning and control
The Little Helper is involved in the EU-FP7 projects TAPAS and GISA(ECHORD).
For more information see www.machinevision.dk or www.m-tech.aau.dk
Contacts:
- PhD Student Mikkel Rath Pedersen, mrp@m-tech.aau.dk
- PhD Student Carsten Høilund, ch@m-tech.aau.dk
- Postdoc Simon Bøgh, sb@m-tech.aau.dk
- Postdoc Mads Hvilshøj, mh@m-tech.aau.dk
- Professor Ole Madsen, om@m-tech.aau.dk
- Associate Professor Volker Krüger, vok@m-tech.aau.dk
Leave a comment