






The Care-O-bot 3 is a mobile manipulation robot designed by Fraunhofer IPA that is available both as a commercial robotic butler, as well as a platform for research. The Care-O-bot software has recently been integrated with ROS, and, in just short period of time, already supports everything from low-level device drivers to simulation inside of Gazebo.
The robot has two sides: a manipulation side and an interaction side. The manipulation side has a SCHUNK Lightweight Arm 3 with SDH gripper for grasping objects in the environment. The interaction side has a touchscreen tray that serves as both input and "output". People can use the touchscreen to select tasks, such as placing drink orders, and the tray can deliver objects to people, like their selected beverage.
The goals of the Care-O-bot research program are to:
- provide a common open source repository for the hardware platform
- provide simulation models of hardware components
- provide remote access to the Care-O-bot 3 hardware platform
Those first two goals are supported by the care-o-bot open source repository for ROS, which features libraries for drivers, simulation, and basic applications. You can easily download the source code and perform a variety of tasks in simulation, such as driving the base and moving the arm. These support the third goal of providing remote access to physical Care-O-Bot hardware via their webportal.
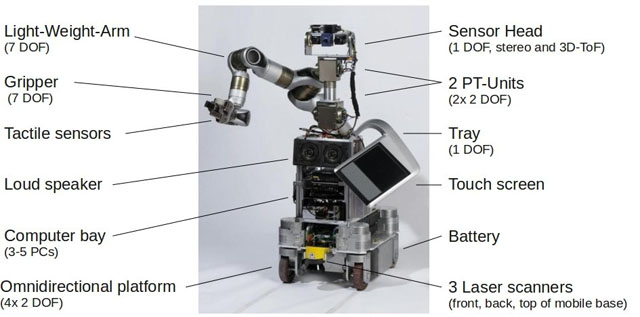
For sensing, the Care-O-bot uses two SICK S300 laser scanners, a Hokuyu URG-04LX laser scanner, two Pike F-145 firewire cameras for stereo, and Swissranger SR3000/SR4000s. The cob_driver stack provides ROS software integration for these sensors.
The Care-O-bot runs on a CAN interface with a SCHUNK LWA3 arm, SDH gripper, and a tray mounted on a PRL 100 for interacting with its environment. It also has a SCHUNK PW 90 and PW 70 pan/tilt units, which give it the ability to bow through its foam outer shell. The CAN interface is supported through several Care-O-bot ROS packages, including cob_generic_can and cob_canopen_motor, as well as wrappers for libntcan and libpcan. The SCHUNK components are also supported by various packages in the cob_driver stack.
The video below shows the Care-O-bot in action. NOTE: as the Care-O-bot source code is still being integrated with ROS, the capabilities you see in the video are not part of the ROS repository.
Leave a comment