





While not yet complete, ROS is now one step closer to working on Windows using the Minimal GNU compiler toolchain thanks to the work of Daniel Stonier and Yujin Robot. If you are a windows user and have experience using MinGW or cross compiling there is a tutorial showing how to use Qt with ROS on Windows up for people interested in testing and improving ROS support for Windows.
Announcement from Daniel Stonier of Yujin Robot to ros-users
Greetings all,
We've had a need to develop test and debugging apps for our test and factory
engineers, who, unfortunately (for them!), only use windows. While service
robotics' patched ros tree could give us msvc apps, it wasn't patched into
ros mainstream and it couldn't let us share our own testing apps on linux
with the test engineers on windows without building two of each application.
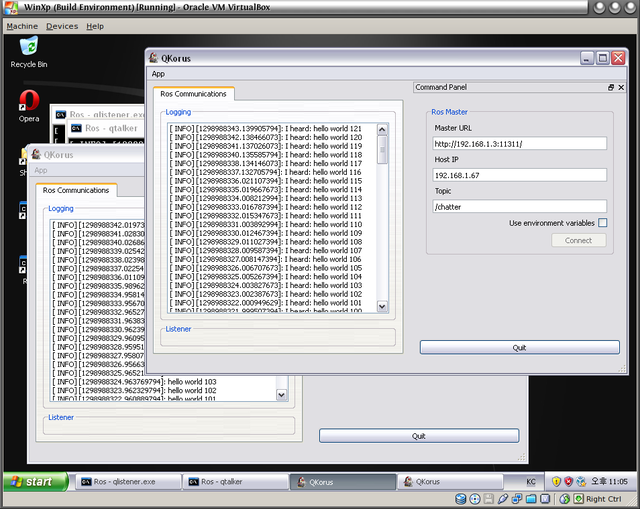
So...enter mingw cross <http://mingw-cross-env.nongnu.org/>! We've now got
this patched in eros/ros up to being able to run a talker/listener and add
int server/client along with inbuilt support for qt as well.
If you're interested in being a guinea pig to test this, or just curious,
you can find a tutorial on the ros wiki here:
http://www.ros.org/wiki/eros/Tutorials/Qt-Ros on Windows
If you come across any bugs (in the tutorial or the installation), reply to
this email, or contact me on irc in OFTC #ros so we can squash the buggers.
Hopefully as time goes by we can patch support in for other commonly used
ros packages as well as adding rosdeps upstream to the mingw cross
environment. We also aim to get ros running on msvc in a more complete way,
but that will need to wait for the rebuild of the ros build environment that
is looming.
Cheers!
Daniel Stonier (Yujin Robot)
Leave a comment