





NavVis presents new large scale mapping technology: The impressive shipping exhibition at Deutsches Museum can now be explored online and in 3D.
NavVis utilizes a trolley that's equipped with three laser scanners and six cameras. As a human operator wheels that trolley through the area to be mapped, the scanners record the horizontal and vertical dimensions of the hallway while the cameras record panoramas. The software framework is based on ROS, which allowed for a very modular design, as Suat Gedikli, Chief Software Architect at NavVis, says. One of the main advantages of their mapping device is its efficiency: In contrast to Google's mapping trolley, the operator does not have to crouch to move out of the field of view of the panoramic camera. With the patented NavVis camera head, the six cameras are assembled in a way such that the trolley operator is in their blind spot and therefore not visible. Hence 360-degree panoramas can be continuously recorded while moving the trolley.
![[NavVis]TrolleyM3_total_3.png](http://www.ros.org/news/assets_c/2014/10/[NavVis]TrolleyM3_total_3-thumb-480x317-966.png)
The start-up recently teamed up with Deutsches Museum to digitize their impressive shipping exhibitions, which were mapped in less than one hour. The result is a 3D map of the exhibition, overlaid with photos of every square inch of all the surfaces.
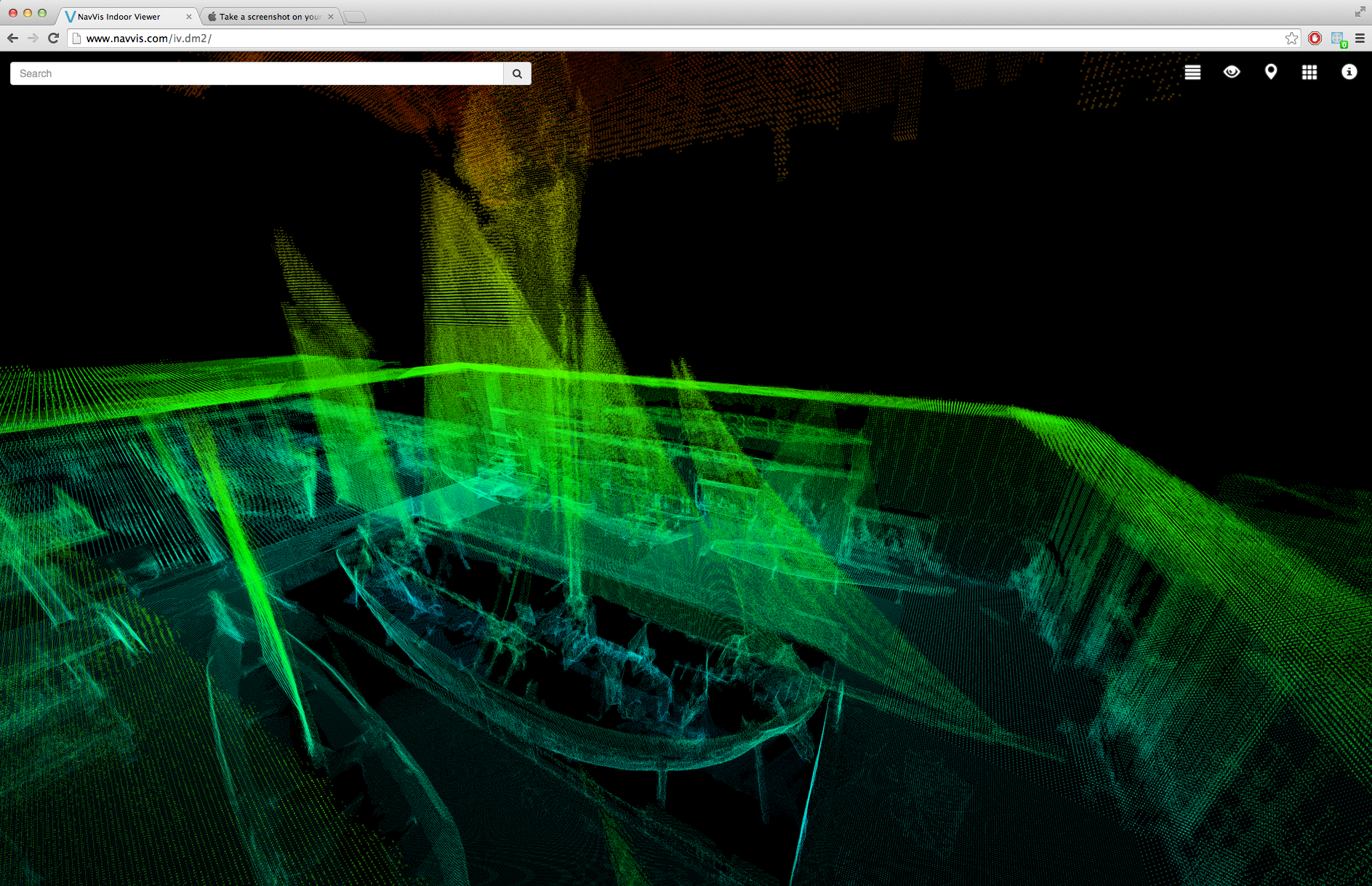
Similar to Google Street View, their HTML5 based IndoorViewer allows people to virtually explore the museum online. Additionally, administrators can add content like text, images, video to various points on the map, which can then be accessed by users. This interactive feature also lets users do things like obtaining measurements between different points in the building (which is important for architects and in construction site monitoring applications).
NavVis, which was only founded in May of last year, is focused on public-oriented showcases and business-to-business applications. Felix Reinshagen, co-founder and managing director: "As the first step, our application is aimed at companies in the building management segment that are confronted with challenges such as documentation, inventory, path-finding and task management. We make our hardware, software and service available to them so that they can have their building and industrial plants digitized while handling the usage of their data according to their own requirements. An area the size of the Deutsches Museum is mapped and posted online within three working days for a four-figure amount."
Leave a comment