





Cross posted from: Ros-Industrial
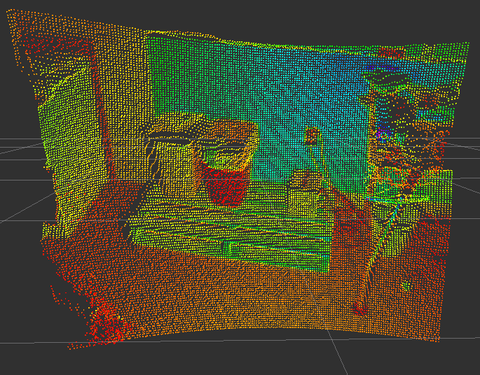
Love Park Robotics has announced a ROS driver for the new IFM Efector O3D303 3D camera system. This sensor was officially released in Germany on April 13, 2015. The O3D303 is a time-of-flight sensor, specifically designed for use in industrial environments and automation applications. The 176x132 element detector features a relative accuracy of +/-4mm. In addition to the robust design, it is able to operate in illumination conditions ranging from complete darkness to sunlight. It is also affordable, at a per-unit cost of $1250 USD. A picture of the O3D303 is shown below along with a point cloud of an imaged pallet (taken in an office environment) to highlight the quality of the sensor data.

As part of our beta test period, Love Park Robotics developed a software interface to the O3D303 that allows us to utilize the sensor within software frameworks such as PCL, OpenCV, and ROS. This code has been made available as open-source on Github in the following repositories: libo3d3xx and o3d3xx-ros. Additionally, we are working with the ROS Industrial community to make binary debian packages available as part of the core ROS and ROS-I distributions.
For more information see the ROS Industrial Blog Post
Leave a comment