





From Lars Berscheid
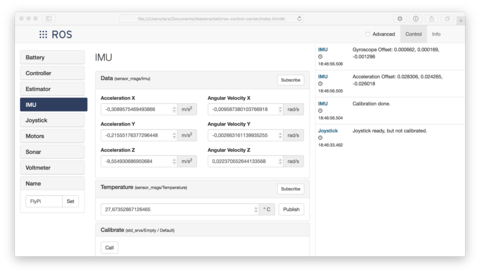
The ROS Control Center is a universal tool for controlling ROS robots. It runs in the browser using a websocket connection androslibjs from RobotWebTools. In general, the ROS Control Center offers an easy way to
- show nodes, topics and service names,
- subscribe and publish messages,
- call services,
- show and change parameters.
Furthermore, it contains features like custom formatting for your own message and service types, a console output and a battery status view. A camera stream view based on the Web Video Server is implemented, many standard message and service types (from common_msgs or std_srvs) work out of the box. It can save multiple robot configurations and has a built-in mode to hide unimportant topics and services. And even better, you can check it out online!
Find more infos at https://github.com/gaug-cns/ros-control-center . Feedback and contributions are really welcome!
Leave a comment