From Román Navarro
Hi ROS community!
A new package for the SICK S3000 safety laser scanner is available. It's a basic driver based on the old Player/Stage driver.
Please add the Google Code repository to the index:
Best Regards,
Román Navarro
 |
About | Support | Status | answers.ros.org | |
     |
||
From Roberto Guzmán of Robotnk
Hi ROS community!
A ROS stack for the SummitXL robot is available. The repository includes the necessary simulation nodes, teleoperation for different pads, and some autonomous navigation.
Please add the Google Code repository to the index:
http://code.google.com/p/summit-xl-ros-stack/
Best Regards,
Robert
From Kevin Walchko
Hello,
I would like to submit a new repository. Since the current ROS joystick drivers for the PS3 controller don't support OSX, I was able to use glfw ( a cross platform library) to build a node that publishes the sensor_msgs/Joy message.
The git repository is located: https://github.com/walchko/osx_joystick
I also documented how to connect the controller to OSX 10.8 via bluetooth. Welcome any suggestions or comments.
Kevin
A new package from Paul Bouchier
A new package: rosserial_embeddedlinux, that's part of the rosserial stack and gives embedded linux systems the ability to run ROS nodes is now available.
With the rosserial_embeddedlinux package, you can use ROS with Linux systems that don't or can't run full-blown ROS. The package provides a ROS communication protocol that works over your embedded linux system's wifi or network connection (or its serial port) and communicates with a ROS message proxy running on a native ROS system. It allows your embedded linux system to run apps that are close to full fledged ROS nodes that can publish and subscribe to ROS topics, provide services, and get the ROS system time over any of the supported connection types.
Rosserial_embeddedlinux extends the rosserial_arduino code that enabled arduino to present a ros node. It supports multiple nodes.
A description of the architecture and overview is on the wiki here: http://ros.org/wiki/rosserialembeddedlinux Tutorials including installation, and hardware-neutral and vendor-specific examples are here: http://ros.org/wiki/rosserialembeddedlinux/Tutorials
The package is general purpose, and not tied to any particular hardware vendor.
Access to the source code and bug tracker is provided on kforge here: https://kforge.ros.org/projects/rosserial/
ROS indexer maintainers, please add this package to the indexer.
Thanks to Mike Ferguson and Tully Foote for their encouragement at ROSCON to build this.
Regards
Paul Bouchier Dallas Personal Robotics Group
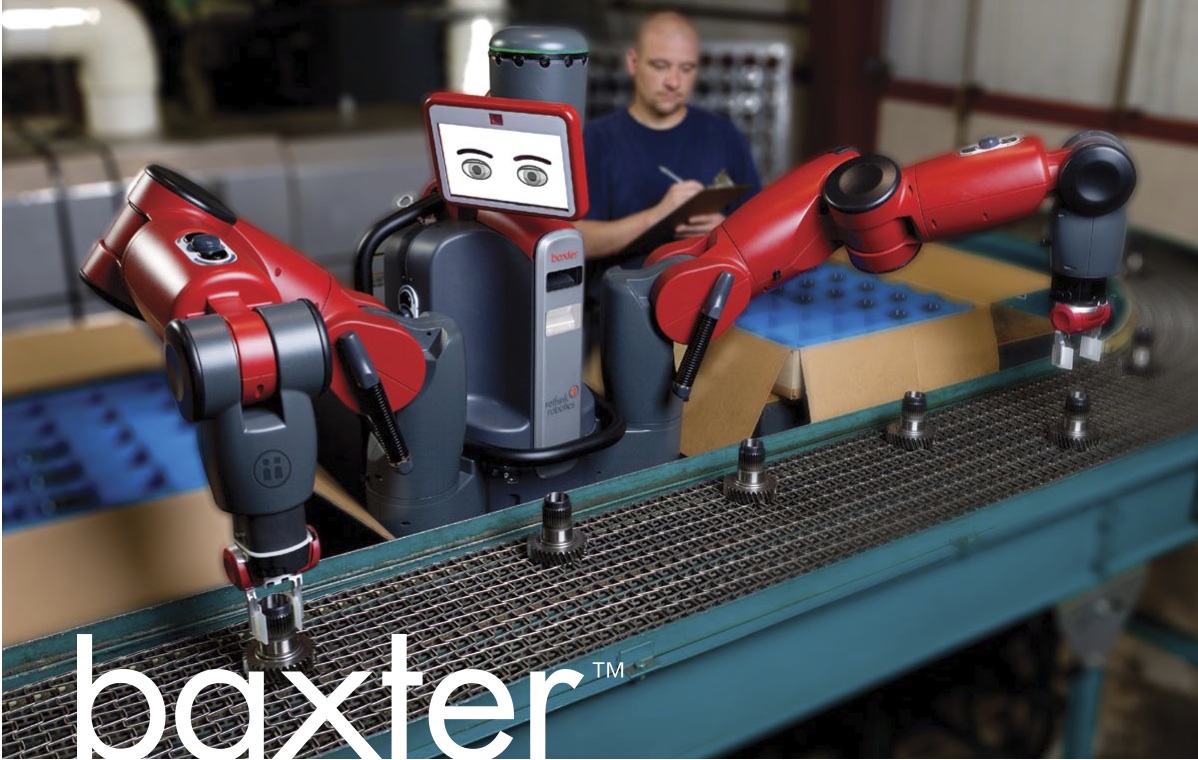
There's exciting news out of Boston today with the launch of Rethink Robotics's new robot. Rethink Robotics is developing a family of low cost and highly intelligent robots that can perform simple tasks in a manufacturing environment, increasing the productivity of the people around them. Rethink Robotics was founded by Rodney Brooks, former Director of the MIT Computer Science & Artificial Intelligence Laboratory, and co-Founder of iRobot Corporation.
Rethink's robots can be taken out of the box, taught a task by anyone, and start work in a few hours, eliminating the need for systems integration. They are safe to interact with people at close range and are easy to train and retrain on the fly. They are nothing like any existing industrial robots.
While all of this is very exciting for the robotics industry, and certainly for our friends at Rethink, what we personally find most exciting is the role played by ROS in today's news. Rethink's new Baxter robot is, in the words of CEO Scott Eckert, "built upon ROS." We had some hint from Rethink's (then Heartland's) support of ROSCon 2012 that they were doing something with ROS, but we were very pleasantly surprised today to hear that ROS is such a central part of Baxter.
As ROS edges closer to its five-year anniversary, this is a great milestone for the ROS community. Rethink is actively hiring for a Senior Developer Relations Engineer with expertise in ROS, and expects that individual to play an important role as part of the ROS community.
Congratulations to everyone at Rethink Robotics, and we are looking forward to their contribution to the ROS community.
ROS Industrial -- An Enabler for Industrial Robotics?
Development of Industrial Applications with ROS -- Experiences
October 17, 2012
The integration of hardware and software components into new automation applications is still a big challenge regarding interface adaptations, communication, conduction of components and integration tests as well as optimization of parameters for the target scenario. In addition, applications in the automation domain are often developed from scratch with only limited software reuse.
Using component-based development in combination with reuse of existing software and hardware components promises a significant improvement in efficiency for application development.
A prominent example for a widely used component-based framework is ROS, which focuses on code reuse in robotics research and development and offers already great variety of mature robotic soft - ware components (e.g. SLAM, motion planning, 2D/3D perception).
In this conference methods and procedures for the component based development with ROS are presented that increase the reusability of existing components. Furthermore, the ROS Industrial initiative is introduced that matches existing ROS components to the needs of industrial applications (e.g. quality assurance, robust - ness, etc.). Concrete examples how ROS is already used in industrial applications today are given in the conference.
We are looking forward to welcome you at Fraunhofer IPA at our conference.
OBJECTIVES
In this conference we want to bring together representatives from academia and industry to exchange experiences on application development with ROS and clarify the needs of industry with respect to ROS Industrial. The participants have the opportunity to get information on the starting initiative of ROS Industrial and generate and influence the goals, timelines and development priorities of the community development.
Conference Topics:
TARGET AUDIENCE
This conference addresses developers of industrial robotic appli - cations, system integrators and executive personal of small and medium-sizeed enterprises as well as R&D division of larger companies in the field of automation, logistics and production.
Full details are available in the PDF Flyer
From Patrick Goebel on the ROS Users Mailing List
Hello ROS Fans,
I have written a little book called ROS By Example. The book is aimed at new ROS users who want to go beyond the Beginner Tutorials and create some working ROS applications, either in simulation or on a real robot like the TurtleBot. The book provides step-by-step explanations of a number of ROS programming examples using code that can be downloaded from the accompanying ros-by-example repository. You can see a preview of the book including the table of contents on the ROS By Example web page.
There are some important caveats if you are considering getting the book:
--patrick
From Ivan Dryanovski at CCNY
Hi everyone,
We have put together a small stack with IMU-related tools, available here:
http://www.ros.org/wiki/imu_tools
The stack contains two packages:
rviz_imu_plugin - A plugin for rviz which visualizes IMU messages, displaying sensor orientation and acceleration.
imu_filter_madgwick - a general-purpose filter which fuses angular velocities, linear accelerations, and (optionally) magnetic field readings into an orientation quaternion. We've tested this with a Phidgets Spatial 3/3/3 IMU sensor (phidgets stack also coming soon).
More info is available at the wiki pages. As always, we welcome any feedback and suggestions.
Cheers,
Ivan