EusLisp is now open source with a BSD license! There are over two decades of robotics research built on top of EusLisp that can now more easily be shared with other researchers. All of this is accessible to ROS users as well: the JSK lab at Tokyo University has developed a roseus package that enables use of ROS within a EusLisp environment. Many robots, including the Kawada HRP-2, Aibo, Nao, and Willow Garage PR2 are compatible with EusLisp.
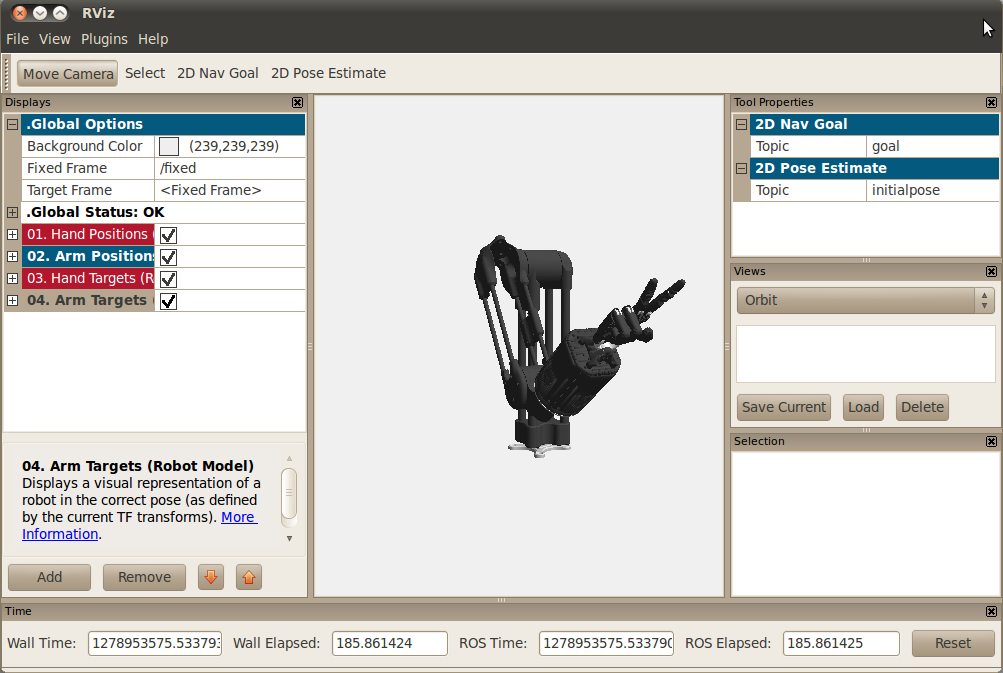
EusLisp is a Lisp-based programming environment for developing robotics programs. It combines a solid modeler, visualization, geometric libraries, simulation and more into a single development environment. EusLisp was originally developed by Toshihiro Matsui at AIST in 1986 and has been heavily used by the JSK Lab at Tokyo University in their humanoid robotics research.
EusLisp is an integrated programming system for the research on intelligent robots based on Common Lisp and Object-Oriented programming. The principal subjects in the field of robotics research are sensory data processing, visual environment recognition, collision avoiding motion planning, and task planning. In either problem, three dimensional shape models of robots and environment play crucial roles. A motivation to the development of EusLisp was a demand for an extensible solid modeler that can easily be made use of from higher level symbolic processing system. Investigations into traditional solid modelers proved that the vital requirement for their implementation language was the list processing capability to represent and manage topology among model components. Numerical computation power was also important, but locality of geometric computation suggested the provision of vector/matrix functions as built-ins would greatly ease programming.
From EusLisp Manual, Part I, EusLisp Basics, 1. Introduction
You can find out more about the open source Euslisp at EusLisp.sourceforge.net, and you can download the code here.






 ROS C Turtle Release Candidate 2 has been released, including ROS 1.2.0. All of the remaining stacks have also reached stable release, including
ROS C Turtle Release Candidate 2 has been released, including ROS 1.2.0. All of the remaining stacks have also reached stable release, including